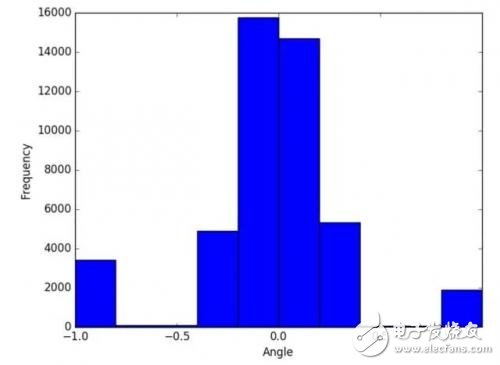
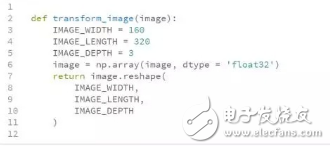
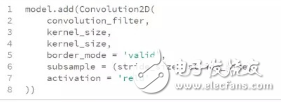
Similar to humans using both eyes to observe the road surface and to manipulate the steering wheel by hand, the unmanned vehicle uses a row of cameras to sense the environment and uses a deep learning model to guide the driving. In general, this process is divided into five steps: Record environmental data Analyze and process data Building a model that understands the environment Training model Refine models that can be improved over time If you want to understand the principles of unmanned cars, then this article should not be missed. Record environmental data An unmanned vehicle first needs the ability to record environmental data. Specifically, our goal is to get an even distribution of the left and right steering angles. This is not difficult to operate and can be achieved in a clockwise and counterclockwise manner around the test site. This kind of training helps to reduce the steering deviation and avoid the car drifting from the side of the road to the embarrassing situation on the other side of the road after driving for a long time. In addition, driving at a slow speed (for example, 10 miles per hour) also helps to record a smooth steering angle when cornering, where driving behavior is classified as: Straight line: 0<=X<0.2 Small turn: 0.2<=X<0.4 Sharp turn: X>=0.4 Return to the center Where X is the steering angle, r is the radius of rotation (in meters), and the formula for calculating the steering angle is X=1/r. The “recovery to the center†mentioned above is very important in the data recording process. It helps the vehicle learn to return to the center of the lane when it hits the road. These record data is stored in driving_log.csv, where each line contains: File path to the camera in front of the lens File path to front left camera image File path to front right camera image Steering angle In the process of recording environmental data, we need to record an image of about 100,000 steering angles in order to provide sufficient data training model to avoid over-fitting due to insufficient sample data. By plotting the steering angle histogram periodically during data recording, it is possible to check whether the steering angle is a symmetric distribution. Analyze processing data The second step is to analyze and prepare the data just recorded for the build model. The goal at this point is to generate more training samples for the model. The image below is taken by a front central camera with a resolution of 320*160 pixels and contains red, green and blue channels. In Python, you can represent it as a three-dimensional array where each pixel value ranges from 0 to 255. The area below the driver's line of sight and the lane markings on both sides have been the focus of research in autonomous driving. These two parts can be cropped using Cropping2D in Keras to reduce the noise input into the model. We can use the open source computer vision library OpenCV to read the image from the file and then flip it along the vertical axis to generate a new sample. OpenCV is ideal for autonomous car use cases because it is written in C++. Other image enhancement techniques like tilt and rotation also help generate more training samples. In addition, it is necessary to flip its steering angle by multiplying by -1.0. After that, you can use the Numpy open source library to reshape the image into a three-dimensional array for easy modeling. Building a model that understands the environment After the image data is fixed, we need to build a deep learning model for the unmanned vehicle to understand the environmental information, and extract features from the recorded images. Specifically, our goal is to map an input image containing 153,600 pixels to an output containing a single floating point value. Each layer of NVIDIA's previous model provides specific functionality and should work well as an infrastructure. NVIDIA model related paper address: https://arxiv.org/pdf/1604.07316v1.pdf After that, we need to normalize the 3D array to unit length to prevent large value deviations in the model. Note that we divide it by 255.0 because this is the maximum possible value for a pixel. It is also necessary to appropriately reduce the pixels in front of the scene and the image of the image in front of the car to reduce noise. After that, we need to convolve three-dimensional arrays such as lane markers to extract key features that are critical to predicting the steering angle. We want the developed model to be able to navigate any road type, so we need to use dropout to reduce overfitting. Finally, we need to output the steering angle as a float.
Some client may feel that 10th Laptop is little old, so prefer 11th Laptop or 12th laptop. However, you will the 10th cpu is even more powerful than 11th, but price is nearly no difference, especially you take in lot, like 1000pcs. As a professional manufacturing store, you can see Laptop i3 10th generation 8gb ram,i5 laptop 10th generation, intel i7 10th gen laptop, etc. It`s a really tough job selecting a right one on the too many choices. Here are some tips, hope help you do that easier. Firstly, ask yourself what jobs you mainly need this Gaming Laptop to do. Secondly, what special features you care more? Like fingerprint, backlight keyboard, webcam rj45, bigger battery, large screen, video graphics, etc. Finally, ask the budget you plan to buy gaming laptop. Thus you will get the idea which laptop is right one for you.
Except integrated laptop, also have graphic laptop with 2gb or 4gb video graphic, so you can feel freely to contact us anytime and share your basic requirements, like size, cpu, ram, rom, video graphics, quantity,etc. More detailed value information provided in 1-2 working days for you.
10th Laptop,Laptop I3 10th Generation 8gb Ram,I5 Laptop 10th Generation,10th Generation Laptop,Intel I7 10th Gen Laptop Henan Shuyi Electronics Co., Ltd. , https://www.shuyitablet.com